不同的人往往有独特的需求和偏好,尤其是在清洁或整理方面。家庭机器人,特别是旨在帮助人类做家务的机器人,理想情况下应该能够以考虑到这些个人偏好的方式完成任务。
普林斯顿大学和斯坦福大学的研究人员最近开始使用大语言模型(LLM)来个性化家庭机器人提供的帮助,大语言模型是一类人工智能模型,在ChatGPT发布后变得越来越流行。他们的方法已在arXiv上预先发表的一篇论文中提出,最初在名为TidyBot的移动机器人上进行了测试,该机器人旨在整理室内环境。
JimmyWu、RikaAntonova和他们的同事在论文中写道:“机器人要想有效地提供个性化的物理帮助,它必须学习用户的偏好,这些偏好通常可以重新应用于未来的场景。”“在这项工作中,我们研究了使用机器人进行家庭清洁的个性化,这些机器人可以通过捡起物体并将其收起来来整理房间。”
研究人员提出的方法利用了ChatGPT等法学硕士广泛记录的总结功能。这些模型在经过相对较小的数据集或场景示例的训练后可以总结信息或提供通用指南。
作为研究的一部分,吴、安东诺瓦和他们的同事使用法学硕士来创建用户在整理方面的偏好的“概要”,这些偏好基于用户提供的一些输入。例如,用户可能会插入诸如“红色衣服放在抽屉里,白色衣服放在衣柜里”之类的文本输入,模型将制定通用偏好,然后指导机器人的动作。
“一个关键的挑战是确定放置每个物体的合适位置,因为人们的喜好可能会根据个人品味或文化背景而有很大差异,”吴、安东诺瓦和他们的同事在论文中解释道。
“例如,一个人可能更喜欢将衬衫存放在抽屉里,而另一个人可能更喜欢将它们放在架子上。我们的目标是建立一个系统,可以通过事先与特定人的互动,从少数示例中了解这种偏好。我们证明了这一点机器人可以将基于语言的规划和感知与大型语言模型(LLM)的小样本总结能力相结合,以推断广泛适用于未来交互的广义用户偏好。”
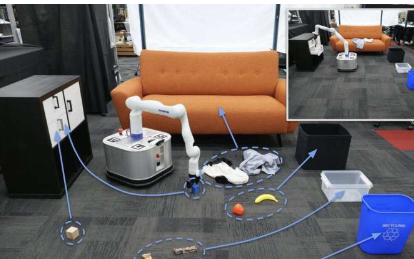
为了评估他们的方法,研究人员进行了一系列测试,评估它在从基于文本的数据集中输入数据时产生的广义偏好,以及它如何影响真实机器人以个性化方式整理的能力。他们专门将其应用于TidyBot,这是他们开发的一款机器人,可以清洁地板,同时还能拾取周围的随机物体并将它们放置在特定的位置。
Wu、Antonova和他们的同事写道:“这种方法能够快速适应,并且对我们的基准数据集中未见过的物体实现了91.2%的准确率。”“我们还在名为TidyBot的真实移动操纵器上展示了我们的方法,它在真实测试场景中成功放置了85.0%的物体。”
该研究团队最近的工作强调了法学硕士的潜力,它不仅可以作为帮助用户完成书面任务或回答问题的工具,而且还可以增强机器人系统的能力。未来,它可能会激励其他团队开始测试这些模型在机器人应用中的潜力。
研究人员提出的基于法学硕士的方法和他们开发的TidyBot机器人很快也可能有助于创建越来越先进的家庭机器人,这些机器人可以按照用户偏好的方式完成家务和整理环境。进一步的研究还可以进一步开发这种方法并提高其性能,例如使其在高度混乱的环境中表现更好。
研究人员写道:“我们对现实世界系统的实现包含一些简化,例如使用手写操作原语、使用自上而下的抓取以及假设已知的容器位置。”
“可以通过将更先进的原语纳入我们的系统并扩展感知系统的功能来解决这些限制。此外,由于移动机器人无法驶过物体,因此该系统在过度混乱的情况下无法正常工作。将其纳入其中将很有趣更先进的高层规划,这样机器人就不会总是捡起最近的物体,而是可以推理是否需要首先为自己清理一条路径,以穿过杂乱的物体。”