厘米级步行和爬行机器人之所以受到市场欢迎,是因为它们能够探索狭窄或杂乱的环境,而且制造成本较低。现在,在机械工程和应用力学(MEAM)GabelFamilyTerm助理教授CynthiaSung的带领下,研究人员从折纸结构中汲取灵感,精心设计了一种更简化的方法来设计和制造这些机器人。
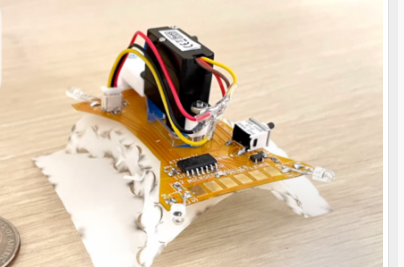
这款厘米级四足动物被称为CurveQuad,它利用弯曲折纸折纸进行自折叠、展开、爬行和转向,所有这些都使用单个电机。
与更常用的直折痕设计相比,该技术中的弯曲折痕具有有趣的机械性能,因为它们会引起折叠片材的弯曲。能量存储在折痕折叠和面板弯曲中,可以使用更少的执行器实现受控、可逆和复杂的运动。
“机器人之所以能够做这些事情,是因为它使用了弯曲的折痕,”Sung说,他也是宾夕法尼亚大学通用机器人、自动化、传感和感知(GRASP)实验室的成员。
“由于它很简单,因此相对便宜,我们认为未来可以做出类似的设计来快速部署机器人群,每个机器人的生产成本可以是美元甚至美分。”
研究结果发表在《IEEE/RSJ国际智能机器人和系统会议论文集》杂志上。研究人员于10月2日在密歇根州底特律举行的2023年IEEE/RSJ国际智能机器人和系统会议(IROS2023)上展示了他们的工作。
CurveQuad的单电机用于自动折叠和移动,减少了机器人的总质量和体积。
受折纸启发的设计还简化了厘米级机器人的制造和组装,方法是用几张平板材料制造整个机器人或其部件,然后将其折叠成3D形状,通常带有完全嵌入式电子设备、执行器和船上计算。这些制造工艺还可以扩展到大批量生产。
CurveQuad是可操纵、单执行器步行机器人的稀疏设计空间的新成员。主要作者、Sung机器人实验室的博士生DanielFeshbach表示,它的长度仅为8厘米,重量约为11克,对于基于电机的步行机器人来说相对较小且较轻。
“CurveQuad最广泛的含义是提供证据,证明美丽、平滑的弯曲折叠可以从非常简单的折叠模式产生复杂且有用的运动,”他说。“弯曲的折痕图案是CurveQuad的核心特征,它使CurveQuad只需一台电机即可自动折叠、爬行和转向。”
研究人员通过将机器人从不同的起始位置和方向转向光源来演示基本的反馈控制。然后,该团队通过四个机器人同时转向光来展示群体聚集。
结果强调了自组装和可部署机器人中的弯曲折纸如何支持运动等复杂运动。未来的研究将探讨小型、消耗性机器人如何探索杂乱或危险的环境。
“CurveQuad是我们实验室一系列工作的一部分,重点是简化机器人设计和组装,以便公众更容易访问、定制和使用它们,”Sung说。
“例如,考虑将一箱平板包装机器人带到某个地方,让它们全部折叠起来并四处走动以进行探索或传感,然后放回盒子中进行存储,直到下次使用。我们目前正在开发该机器人的第二个版本,该机器人具有完全集成的电子设备,以便我们能够展示这种能力。”