允许机器人切割由多种材料制成的物体的系统
人类本能地学会根据他们处理的材料和他们试图完成的任务来调整他们的动作。例如,在切特定的水果或蔬菜时,他们可能会学会切开较硬的部分,例如鳄梨或桃子种子,或者小心地去除外皮。
为了协助人类完成日常任务,例如烹饪和准备食物,机器人还应该能够有效地切割具有混合材料成分或纹理的物体。然而,到目前为止,将这种能力转移到机器人上已被证明是相当具有挑战性的。
哥伦比亚大学、卡内基梅隆大学、加州大学伯克利分校和美国其他研究所的研究人员最近创建了RoboNinja,这是一种基于机器学习的系统,可以让机器人切割多材料物体,尤其是具有硬核的软物体。他们的论文发表在arXiv预印本服务器上,最终可能有助于增强旨在帮助人类完成家务和日常厨房任务的机器人的能力。
“与之前使用开环切割动作切割单一材料物体(例如,切黄瓜)的作品相比,RoboNinja旨在去除物体的柔软部分,同时保留刚性核心,从而最大限度地提高产量,”Zhenjia徐、周贤和他们的同事在他们的论文中写道。“为实现这一目标,我们的系统通过使用交互式状态估计器和自适应切割策略来关闭感知-动作循环。”
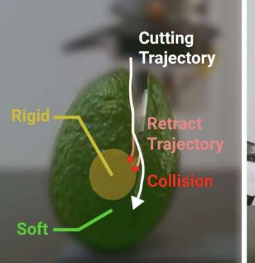
Xu、Xian和他们的同事着手创建一个系统,让机器人能够有效地切割芒果、桃子和鳄梨等水果,从中间的坚硬种子中去除软果肉。他们系统的目标是尽可能多地去除果肉,同时尽量减少与中心种子的碰撞并消耗有限的能量。
“该系统首先使用稀疏碰撞信息来迭代估计物体核心的位置和几何形状,然后根据估计的状态和容差值生成闭环切割动作,”Xu、Xian和他们的同事在他们的论文中写道。“策略的‘自适应性’是通过容差值来实现的,它在遇到碰撞时调节策略的保守性,与估计的核心保持自适应安全距离。”
为了评估他们的多材料物体切割系统,研究人员创建了一个更适合评估他们正在处理的问题的切割模拟环境。这种环境具有不同的场景,在这些场景中,机器人切割由软质和硬质材料组合而成的物体。
“现有的模拟器在模拟多材料物体或计算切割过程中的能量消耗方面存在局限性,”Xu、Xian和他们的同事在他们的论文中解释道。“为了解决这个问题,我们开发了一种可区分的切割模拟器,它支持多材料耦合,并允许生成优化轨迹作为政策学习的示范。”
Xu、Xian和他们的同事进行的模拟结果很有希望,因为RoboNinja允许他们的模拟机器人抓手从物体上移除大量软材料,同时最大限度地减少与刚性部件的碰撞并消耗合理的能量。随后,该团队在真实的机器人抓手上测试了他们的框架,以进一步验证其在现实环境中以及切割具有不同核心几何形状的物体时的性能。
“我们的实验表明,我们的方法能够很好地推广到新的核心几何形状甚至真正的水果,”研究人员在他们的论文中总结道。“我们希望我们的实验结果和新开发的模拟器能够激发未来的机器人学习工作,涉及与多材料物体的交互。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
作为A股市场中极具代表性的黄金珠宝行业龙头企业,作为中国历史最悠久的珠宝品牌之一,老凤祥(股票代码:600612)...浏览全文>>
-
宝子们,杭州 房子装修完成啦!这次要给大家分享几家设计超赞的装修公司哦。它们各具特色,从空间规划到风格...浏览全文>>
-
欲筑室者,先治其基。在上海,装修房子对于每个业主而言,都是极为关键的一步,然而,如何挑选一家值得信赖的...浏览全文>>
-
2025年以来,联通支付严格贯彻落实国家战略部署,以数字和科技为驱动,做好金融五篇大文章,履行支付为民社会...浏览全文>>
-
良工巧匠,方能筑就华居;精雕细琢,方可打造美家。当我们谈论装修公司时,选择一家靠谱可靠的公司是至关重要...浏览全文>>
-
在当今社会,随着城市化进程的高速推进,建筑垃圾的产生量与日俱增。据权威数据显示,我国每年建筑垃圾产生量超 ...浏览全文>>
-
家人们,在上海要装修,选对公司那可太重要了!古语有云:"安得广厦千万间,大庇天下寒士俱欢颜。"一个温馨的...浏览全文>>
-
近年来,新能源汽车市场发展迅猛,各大品牌纷纷推出各具特色的车型以满足消费者多样化的需求。作为国内新能源...浏览全文>>
-
近年来,随着汽车市场的不断变化和消费者需求的升级,安徽滁州地区的宝来2025新款车型在市场上引起了广泛关注...浏览全文>>
-
随着汽车市场的不断变化,滁州地区的消费者对高尔夫车型的关注度持续上升。作为大众品牌旗下的经典车型,高尔...浏览全文>>
- 安徽滁州途安L新车报价2022款,最低售价16.68万起,入手正当时
- 小鹏G7试驾,新手必知的详细步骤
- 别克GL8预约试驾,4S店的贴心服务与流程
- 安徽阜阳ID.4 CROZZ落地价全解,买车必看的省钱秘籍
- 淮北探岳多少钱 2025款落地价,最低售价17.69万起现在该入手吗?
- 安徽淮南大众CC新款价格2025款多少钱能落地?
- 淮北长安启源C798价格,最低售价12.98万起现在该入手吗?
- 安徽淮南途锐价格,各配置车型售价全解析
- 蒙迪欧试驾预约,4S店体验全攻略
- 沃尔沃XC40试驾需要注意什么
- 滁州ID.4 X新车报价2025款,各车型售价大公开,性价比爆棚
- 试驾思域,快速操作,轻松体验驾驶乐趣
- 试驾长安CS35PLUS,一键搞定,开启豪华驾驶之旅
- 天津滨海ID.6 X落地价限时特惠,最低售价25.9888万起,错过不再有
- 天津滨海凌渡多少钱?看完这篇购车攻略再做决定
- 安徽池州长安猎手K50落地价,买车前的全方位指南
- 山东济南ID.6 CROZZ 2024新款价格,最低售价19.59万起,现车充足
- 试驾海狮05EV,新手必知的详细步骤
- 生活家PHEV多少钱 2025款落地价走势,近一个月最低售价63.98万起,性价比凸显
- 奇瑞风云A9试驾,新手必知的详细步骤